




2016-12-01 【新华网】
11月29日-30日,第23届机械电子与机器视觉国际会议在东南大学九龙湖校区举行。本次大会的到场专家有超过60%都来自国外,其中机器人国家重点实验室副主任韩建达、德国达姆施塔特理工大学运动生物学教授 Andre Seyfarthy 以及哈佛大学生物设计实验室的YE DING受邀作为主讲人,现场分享他们各自的研究成果。本次大会除了各路行业大咖参与,还涌现出一些后起之秀,东南大学机械工程学院14级研究生张琪就是其中之一。在全向蠕动分拣平台的研究中,她创新实践,设计出了一种新型软体驱动器,针对这个课题,在本次大会上她还做了专题报告。
从刚性机器人到软体机器人
一提到机器人,很多人首先联想到的是动作机械、浑身钢筋铁骨的冰冷形象。但随着软体机器人概念的兴起,人们原有的这一刻板印象将被彻底颠覆。
在生产组装线和工业产房中,刚性机器人代替人类,承担着繁重的体力劳动,其速度、力量和盲目的重复都是人类难以企及的。但这些机器人也存在一些问题,它们无法胜任超出编程参数的任务,不能应对无法预测的新环境,它们不能在狭窄的空间中移动,并且必须安装特别坚硬的部件,以此应对诸如建筑崩塌等种种危险。但软体机器人却不一样。
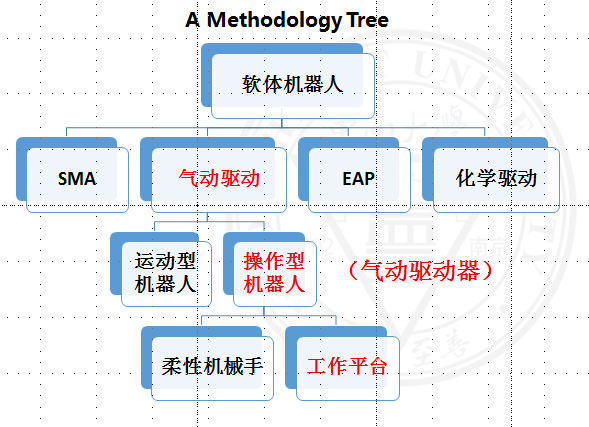
东南大学机械工程学院博士生导师张志胜教授介绍说,软体机器人是近年来新发展的一类机器人,其模型大多来自于自然界的软体生物。目前研究的软体机器人由柔性材料制成,可在大范围内连续变形,具有无限多自由度,能改变自身形状和尺寸。软体机器人对环境具有更好的适应性,可以挤过比自身常态尺寸小的缝隙,进入传统机器人无法进入的空间。比起传统刚性机器人来说,软体机器人更适合进行人机交互,帮助人类进行日常活动。
搬运分拣贵重易碎物品,科学家研发新平台
因为柔顺性极好,软体机器人还可以对易碎及柔性物体进行搬运分拣操作。而这也是软体机器人的一个最新研究方向——软体工作平台。
张志胜教授介绍,软体工作平台,不仅能实现易碎物品(动物肝脏)的分拣,比较真实地模拟出各种平面的3D形状,还可以实现贵重、易损物品的平衡搬运,动态分拣;做成病床等辅助装置,可以使重症病人、老人等其他失去自我行为能力的人以一种较为舒适的方式使身体达到所需的位置。
目前,张琪同学所在的团队正在研究全向蠕动分拣平台。这是一种实现物品平衡搬运与动态分拣的软体蠕动平台,它主要用于贵重或易碎物品的搬运和分拣。本课题的研究与设计,为软体机器人的发展提供了一个新的方向,具有很强的科研价值和广泛的市场应用价值。
东大学子设计出新型软体驱动器
在全向蠕动分拣平台,软体驱动器是执行系统的重要组成部分,每个软体驱动器能够很好地实现弯曲、伸缩、平移等运动,是平台执行系统实现既定运动的基础。正是在这个环节,张琪做了创新尝试,设计出了一种新型软体驱动器,能够实现包括伸缩、平移、小弯曲、大弯曲、全弯曲等多种运动,具有占用空间小,运动形式多,运动方向全的优点,从而使操作变得更方便。
软体机器人未来将造福更多人
以往在科幻电影里常会有这样的场景:一个瘫痪的病人,借助某个设备,通过大脑发号施令,可以让自己重新站起来。不仅是站起来,这个设备还会提取大脑中的运动信号,所以即便是在瘫痪的情况下,病人也能按照自己的意志,在各种动作中自如切换……未来,这种场景在我们的生活中可能真实出现。
新西兰科学院院士、新西兰奥克兰大学机械电子系主任徐卫良教授是本次大会的主席,在谈到未来软体机器人的应用前景时,他表示,软体机器人有许多优势,它的硬度、柔软度和可拉伸程度跟人体的皮肤和肌肉很接近,当它穿在人身上,跟人互动接触时,亲和性很好。未来软体机器人在侦察、探测、救援、家庭服务及医疗等领域都有广阔的应用前景。比如,可以做成柔性智能穿戴设备,帮助病人进行康复训练,通过数据的收集分析,可以判断出肌肉受伤的程度,而随着康复训练的推进,又可以继续跟踪分析病人恢复的状况。再者,软体机器人还可以做成一种研究的工具,把过去需要在人身上做的研究或者试验,转移到它们身上。比如研究运动员如何才能提高成绩,研究某些治疗心脏或者胃病的药物在人体的作用反应。可以说,随着技术的发展,未来软体机器人将会造福更多人。(李鑫芳)